[ディープラーニング×ビジネス]活用事例紹介 #5
2020年8月に創業した三豊(みとよ)AI開発は、送電線の点検確認作業を専用の撮影ロボットと、ディープラーニングによる画像解析を組み合わせて行うソリューションを展開している。
同社の武智 大河(たけち たいが)代表取締役社長は、JDLA主催の高専生による事業創出コンテスト「全国高等専門学校ディープラーニングコンテスト2019(DCON2019)」で準優勝を獲得している。ソリューションの強みやDCONでの経験、今後の展開などについて武智社長に聞いた。
三豊AI開発株式会社
事業内容:AI(人工知能技術)に関する研究・開発社会課題解決のためのソリューションの開発
本社所在地:香川県三豊市
設立:2020年8月19日
https://mitoyo-ai-dev.com/
DCON出身「ものづくり×AI」スタートアップ企業の挑戦
―事業内容を教えてください。
「AI送電線点検システム」など、ロボットとAIを組み合わせたソリューションを開発しています。そのほか、業務効率を上げるためのコンサルティングやソフトウエアの受託開発、スマートフォンアプリの開発なども手掛けています。ハードからソフト、AI実装など、ソリューション関連するもの全てを手掛けられることを強みにしています。
―コンサルティングや受託開発は、具体的にはどういった内容なのでしょうか。
「こんなシステムができると便利だけれども、一般的なSIerにお願いしてガチガチなシステムにすると金額がかかりすぎてしまう」といったケースは多いと思います。そのようなお悩みを持つ企業様や自治体様向けに、大手プラットフォーマーが提供している無料のサービスやツールなどを組み合わせて、安価にシステムを構築しています。
―AI送電線点検システムについて概要を教えてください。
まだ開発中の部分もあるので、構想を含めて全体像をお話しします。まずロボットに搭載したカメラを使って送電線の画像を撮影します。ロボットが動く際はドローンの機能と、送電線をレールのようにして走る機能の2つを使い分けます。最初に送電線に乗る時はドローンの機能を使い、撮影の際は送電線の上を走り、鉄塔のところに来るとドローンの機能で飛び越えて再び送電線に乗る、といった具合です。
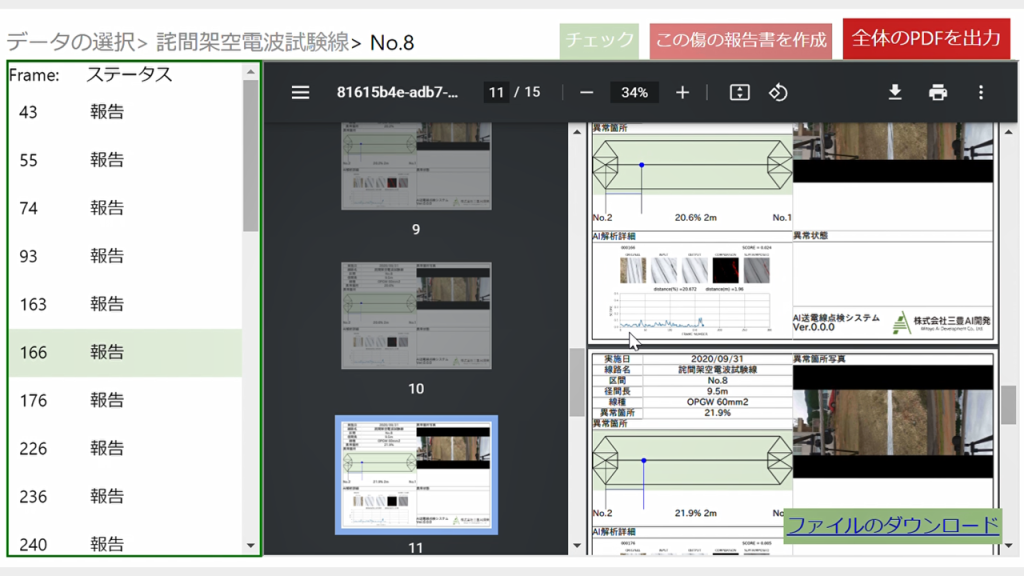
あらゆる角度から送電線を確認できるよう、ロボットには3つのカメラが付いており、その画像をGPSの位置情報を基にして繋ぎます。その画像をディープラーニングが解析し、異常を検知します。確認した結果は、自動で報告書にまとめることが可能です。検知した異常を人間が改めて確認できるよう、専用のビューアーも用意しています。

―人間が改めて確認する理由は何なのでしょうか。
小さな異常ではあるけれども、まだ報告する必要ない、といったものを人間が判断して省くケースがあります。また鳥の糞を異常と判定しまうケースなど、解析のミスも混ざることがあるので、そういったものがそのまま報告されるのを防ぐために人が改めて確認します。
―ディープラーニングを使って、どのように異常を検知しているのでしょうか。
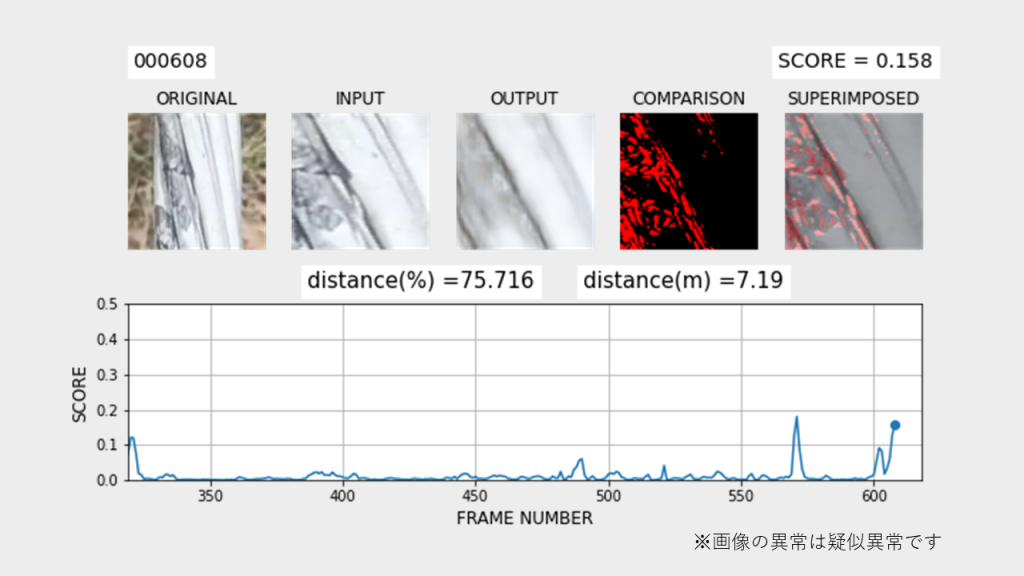
通常の異常検知では、異常と判定された画像を大量に集め、それをディープラーニングに学習させます。しかし、送電線の異常の場合、学習できるような教師データとなる画像が極端に少なく、その方法は難しいことが分かりました。そのため、正常な画像を大量に学習させて特徴を掴み、それに当てはまらないものを異常と判定する、という形を採っています。
私が開発したAIは、色々な環境で活用できるのが強みです。例えば海辺であれば塩が電線に付着していたり、工場の近くでは煙突の煙で電線が汚れている、といったことがあります。付着した塩やススの汚れなどを全て異常として検知すると効率が落ちてしまうので、そういったものを認識しないよう環境に合わせてAIをチューニングできます。
―今お話ししていただいた構想のどれくらいの部分が既に完成しているのでしょうか
AIエンジンについてはほぼ完成しており、実際に四国の企業様にもお使いいただいております。ハードウエアの開発はドローンの部分にまだ課題が残っています。2024~2025年頃の完成を目指しています。
地元企業からの相談が開発のきっかけ
―従来の送電線点検はどのように行われているのでしょうか。
いくつか手法があります。鉄塔の間の電線は100~400メートル程度あり、それをヘリコプターを使って空撮したり、ロボットを鉄塔の上に乗せてレンズの遠近を切り替えながら撮影する、といったやり方があります。そうして撮影した画像を、後から人が目視で確認し、異常を見つける、といった具合でした。
ただ、どちらの手法にも課題がありました。ヘリコプターは人口の多い場所や獣舎の上では使えません。従来のロボットは40キロ以上あり、鉄塔まで運ぶのも、それを鉄塔の上まで運び上げるのも非常に大変で危険でした。異常の発見も目視で行っていたので、時間がかかりますし、異常を見逃すこともありました。
―送電線点検はどういったタイミングで行うのですか。
定期的な通常点検と、雷が落ちた際などに行う臨時点検の2つがあります。
―点検は外観を見るだけで可能なのですか。
はい、基本的に外観から判断します。耐用年数が来たら送電線を交換しますので、外観に出る部分以外の異常については定期交換で対処しています。
―研究を始めたきっかけを教えてください。
2015年頃、私が在籍している香川高等専門学校(香川高専)の研究室にある地元企業の方から相談が持ち込まれたのがきっかけです。その企業では送電線の点検に従来型のロボットを使っており、「40キロもあって重すぎる。何とか使いやすい形に改良できないか」という内容でした。
私は2015年に入学し、しばらくはロボットの研究をメインにしており、ロボコンに出場するなど研究に没頭していました。そんな中で2018年頃に「送電線点検用のロボットもやってみないか」と声をかけていただいたのが、現在の研究を始めるきっかけになりました。お話ししてきた通り、送電線点検はロボットと画像認識用のソフトの組み合わせでできています。私はハード寄りの人間で、ソフトには興味がありませんでしたが、「組み合わせることで新しい価値観が生み出せるのではないか」と感じて研究をすることにしました。
―画像認識にディープラーニング、AIを使うことを決めた理由は何だったのでしょうか。
私が所属していた研究室には画像解析のノウハウがなく、0からのスタートでした。ちょうどディープラーニングによる画像解析が話題になっていた時期でしたので、軽い気持ちで使ってみようと思ったことがきっかけです。強いこだわりがあった訳ではありません。
―その研究で2019年4月のDCONに出場し、準優勝されたのですね。
はい。当時使っていた画像解析手法はディープラーニングではあったのですが、今とは全然違うものでした。その後、研究を重ねて今のエンジンができました。
―DCONではどんなところが評価されたとお考えですか。
DCONに参加する方の多くは情報系の学生です。私は機械系なのでかなり専攻内容が違います。ソフトやプログラム寄りの研究が多い中で、ロボットを絡めた研究をしたことをご評価いただいたのではないか、と思っています。
―2020年8月に起業するまで、どのような流れだったのでしょうか。
DCONの後、ロボコンに参加したのでロボットの研究ばかりしていました。2020年3月頃になって少し落ち着いたところで、JDLAの松尾豊理事長から起業のお話をしていただき、どういうことが必要なのかをレクチャーしていただきました。
当時は起業する考えはなく、就職するつもりでいました。ですが、松尾理事長のお話をうかがい、色々考える中で、気持ちが変わっていきました。
高専の先輩方の過去の研究には、実用的で非常に優れた内容に思えるにも関わらず、論文を出しただけで埋もれしまっているものが多くありました。社会に実装されるには、運よく企業に発見されるしかない、といった具合だったんです。そういったことを考えるうちに、「自分の研究を埋もれさせないためにも起業しよう」と思うようになりました。
―そこから2020年8月の起業まで、急ピッチで動かれたのですね。
はい、次のDCONが2020年8月に決まっていたので、DCONの前に起業していればインパクトが大きいのではないかと考え、すぐに社名を考えたり登記をしたり、といったことに取り組みました。DCON Start Up 応援1億円基金委員会(DSF)の出資も受け、資本金200万円でスタートしました。
人手不足解消やイメージ改善に貢献したい
―AI送電線点検システムが構想通り完成した場合、利用する企業にはどんなメリットがありますか。
送電線点検を行っている企業は人手不足が深刻で、作業員の方の確保に苦労されています。今後は高齢化で、より事態が深刻になるはずです。
人手不足自体も問題ですが、「超肉体労働」といったイメージが40年以上続いていることにより、成り手がいないことも問題です。作業の安全性もこれまで以上に課題になるでしょう。ロボットを使って作業を自動化することで、人手不足や安全性、仕事のイメージ改善に貢献できたら、と考えています。
―現状では40キロのロボットを一人の方が背負って鉄塔に登っているのでしょうか。
その場合もありますし、一部分解して複数人で持ち、上で組み立てる場合もあります。ただ、その場合でも命綱一本で宙づりになりながらロボットを組み立てることになるので、かなり作業は過酷です。
実は、私の研究と並行して香川高専ではロボットの軽量化に取り組んでいまして、今は7キロ程度まで軽量化できています。それでも、ロボットを持って鉄塔に上る負荷はありますし、ロボットが落下した場合は壊れてしまいますので改善が必要です。
―送電線点検以外にも、適用箇所を広げられる可能性はあるのでしょうか。
橋などのインフラの点検に使えないかと考えています。橋であればワイヤーに乗ることができます。手すりにも乗れるので、施設でも使えます。施設であれば、人間の代わりに巡視・警備に使うことができると考えています。
工場などでも使っていただけるよう、足場がケーブルまみれの場所でもロボットが走れるようなアタッチメントの開発にも取り組んでいます。